I. CONTEXTO
El
trabajo presentado en este artículo se enmarca en el PID-5162 de la Facultad
Regional Santa Fe de la Universidad Tecnológica Nacional con vigencia
2019-2020. Por otra parte, el proyecto RADAR se desarrolló como trabajo de fin
de cátedra de Virtualización y Sistemas Operativos Avanzados (VSOA) que se
dicta como asignatura electiva de 5to año de la carrera de Ingeniería en
Sistemas de Información de la mencionada facultad. Los autores Harispe y García
Aguirre son los alumnos de VSOA y el autor Pessolani es el profesor de la cátedra
y director del PID.
II. INTRODUCCIÓN
En
la actualidad, las aplicaciones en la nube demandan cada vez más recursos, los
cuales no pueden ser provistos por un único computador. Es por ello que las
mismas se desarrollan para ejecutar en entornos distribuidos a fin de
incrementar su poder de cómputo y almacenamiento, como también proveer alta
disponibilidad y robustez con calidad de proveedor de servicios. Utilizando un
sistema distribuido se pueden extender las capacidades de cómputo y
almacenamiento a varios equipos físicos (nodos) distintos. Si bien existen
diversas tecnologías de procesamiento distribuido, son muy valoradas aquellas
que ofrecen más facilidades en cuanto a su implementación, operación y
mantenimiento que redundará en menores costos. Son muy apreciadas aquellas
tecnologías que brindan un Imagen de Sistema Único (SSI) y que ocultan tanto a
programadores como a usuarios aspectos tales como la localización y migración
de los procesos, direcciones IPs de uso interno, puertos TCP/UDP, etc. y, sobre
todo, cuando ocultan fallos mediante la utilización de mecanismos de
replicación. Una tecnología que dispone de esas características es un Sistema
de Virtualización Distribuido (DVS) [1].
Un
DVS ofrece entornos de ejecución virtuales distribuidos en los cuales se
permite ejecutar múltiples instancias aisladas de Sistemas Operativos Virtuales
(VOS) [2]. Un VOS ofrece abstracciones y servicios a las aplicaciones de
usuario, pero no gestiona hardware físico, sino dispositivos virtuales
proporcionados por un Sistema Operativo (OS) real. Los recursos con los que
cuenta el DVS están dispersos en diversos nodos de un clúster. Un DVS, además,
presenta capacidades de agregación (permite utilizar múltiples nodos de un clúster
para el mismo VOS), y de particionado (permite ejecutar múltiples componentes
de diferentes VOSs en un mismo nodo) en forma simultánea. Cada VOS distribuido
se ejecuta dentro de un contexto de ejecución o dominio aislado denominado Contenedor
Distribuido (DC). En la Fig. 1 se muestra un esquema topológico de un clúster
DVS.
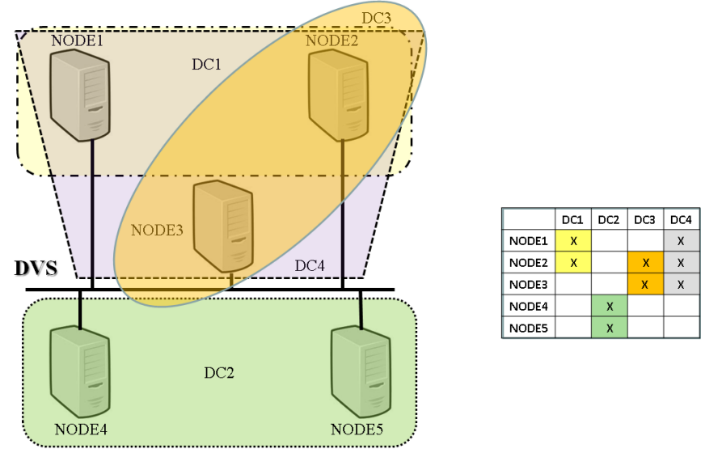
Fig. 1. Topología de un
DVS.
Un
problema que debe considerarse cuando se utiliza un VOS distribuido está
relacionado con la localización de un determinado servicio utilizado por algún
cliente externo o por otro componente del mismo VOS. Una forma de resolver este
problema por fuera del DVS sería utilizando protocolos de Internet ya existentes.
Con el protocolo DNS se puede localizar la dirección IP del servidor, y con ARP
se puede localizar la dirección MAC del mismo dentro de una LAN. Sin embargo,
una cuestión que debe considerarse al trabajar con un clúster, es que la red y
sus nodos pueden fallar impidiendo la continuidad en la prestación de un
servicio dado.
Para
superar este tipo de contingencia se suelen utilizar mecanismos de replicación
tal como Primary/Backup (P/B) [3]. En un esquema P/B un servidor de Backup
sustituye a un servidor Primario cuando éste sufre un fallo, dando continuidad
a la prestación de un servicio y mejorando la disponibilidad y robustez del
mismo. Este servidor de reemplazo, que puede ser temporario o no, tendrá una
nueva dirección IP (y eventualmente dirección MAC), lo que implica que los
demás componentes (o clientes) que requieren de sus servicios las conozcan.
Esto
podría resolverse con protocolos como HSRP [4] o VRRP [5] que utilizan
interfaces de LAN fantasmas que son las referidas por los clientes. El servidor
Primario adquiere la dirección IP/MAC de la interfaz fantasma, y cuando éste
falla, el Backup se convierte en nuevo Primario y la adquiere para sí. Los
clientes, mientras tanto, no perciben esa modificación, salvo por algún pequeño
retraso en la respuesta del servidor.
En
el caso de servicios que utilicen el esquema de Máquinas de Estado Replicadas
(RSM) [6], podrá ser el DNS (por ejemplo, con la utilización de Round Robin DNS)
el que informa al cliente de la IP de un server.
Estas
soluciones, si bien son factibles y muy utilizadas, requieren de numerosas
configuraciones adicionales que inducen mayores costos en su implementación
como en su operación. Por otro lado, los programadores deberán considerar en
sus aplicaciones problemas tales como la localización de servidores después de
fallos o migraciones. Por estos motivos, se propone aquí una solución más sencilla
y transparente que mantiene el estado y configuración del clúster.
Un
DVS mantiene como parte de su estado la identificación de los nodos que lo
componen y de los nodos que componen cada DC. Sería una característica muy
valorada en un DVS disponer de un mecanismo que realice el seguimiento en la
localización de los servicios simplificando las aplicaciones y resolviendo los
problemas de comunicación que puedan surgir entre un cliente y un servidor
producto de cambios de localización de estos últimos. Los cambios de
localización se suelen producir por fallos de procesos, de nodos o de red, o
por la migración del servicio a otro nodo del clúster.
Cuando
un servidor cambia de localización desde un nodo origen a un nodo destino, los
procesos que se comunican con él deben mantener sus comunicaciones a pesar del
cambio y en forma transparente a fin de simplificar la programación. Para
resolver la problemática planteada en forma sencilla se desarrolló RADAR el
cual hace uso de las características presentes en el DVS y mediante la utilización
de un Sistema de Comunicaciones de Grupos (GCS), detecta fallos en los nodos,
redes y procesos que componen el sistema distribuido.
Luego
de detectar un fallo en un nodo o en un proceso o en la red es capaz de
efectuar la redirección automática de las comunicaciones de los clientes al
servidor que brindará el servicio. En cada nodo del DVS donde ejecuten procesos
clientes y no se ejecuten procesos servidores se debe ejecutar una instancia de
RADAR, las que se comunican entre sí utilizando el GCS.
Para
el prototipo de RADAR, el GCS elegido fue Spread Toolkit [7], el cual detecta
todos los tipos de fallos mencionados, pero podrían utilizarse otras
herramientas equivalentes.
Para
realizar las pruebas de funcionamiento sobre el prototipo de RADAR se utilizó
un servicio de disco replicado denominado RDISK [8], el cual utiliza un algoritmo
capaz de sincronizar imágenes de disco entre un servidor Primario y uno o más
servidores de Backup.
El
funcionamiento de RADAR es totalmente transparente a la red subyacente debido a
que no requiere de configuraciones de red adicionales a las ya establecidas al
momento de configurar el DVS, facilitando su despliegue y mantenimiento.
El
resto del artículo se organiza de la siguiente manera: en la Sección III se
analizan trabajos relacionados y sus características principales. En la Sección
IV se presenta la base tecnológica en base a la que se desarrolló RADAR.
En
la Sección V se describe el diseño e implementación del prototipo de RADAR. Las
pruebas realizadas y los resultados obtenidos se exponen en la Sección VI y finalmente,
las conclusiones y trabajos futuros se presentan en la Sección VII.
III. TRABAJOS RELACIONADOS
La
problemática planteada no es desconocida por la comunidad científica, por lo
que previamente se han llevado a cabo diversos trabajos de investigación y
desarrollo para darle solución. A continuación, se analizan las herramientas
actuales más utilizadas.
Zookeeper
[9] es una herramienta que provee un repositorio distribuido de clave/valor.
Ofrece un servicio distribuido de configuración, un servicio de sincronización,
y un registro de nombres para grandes sistemas distribuidos.
Zookeeper
es confiable porque soporta fallos entre los nodos. Si la conexión con el
servidor se interrumpe, el cliente se conectará a un servidor diferente del
grupo. Si bien Zookeeper es utilizado por grandes compañías, tiene algunos
inconvenientes. Es de alta demanda computacional como consecuencia de que está
desarrollado en Java y que tiene gran cantidad de dependencias. Para el
registro y descubrimiento de servicios se requiere adicionar sistemas
complementarios.
etcd
[10] es otra herramienta que ofrece un repositorio distribuido clave/valor,
consistente y confiable. Entre sus características destacables cabe mencionar
que brinda alta disponibilidad, rápidos tiempos de respuesta y transacciones
seguras. Además, tolera la elección de líderes durante particiones de red y las
fallas en nodos.
Para
que etcd pueda realizar tareas como el registro y el descubrimiento de
servicios, es necesario complementarlo con otras herramientas.
Consul
[11] es una herramienta distribuida de alta disponibilidad y consistencia
utilizada para el descubrimiento de servicios, control de estado y como
repositorio clave-valor. Al igual que etcd, utiliza el algoritmo de consenso
distribuido Raft [12].
Consul
está integrado por un sistema de descubrimiento y registro de servicios, por lo
que no es necesario combinarlo con otras herramientas.
Kubernetes
[13] es un gestor de contenedores desarrollado por Google. Permite automatizar
la implementación, el escalado y la administración de aplicaciones en
contenedores. Kubernetes ejecuta cargas de trabajo en unidades llamadas pods,
para los que dispone de un servicio de localización. Se ofrecen 2 mecanismos
básicos para localización de servicios: Variables de entorno y DNS.
Docker
[14] es otro gestor de contenedores ampliamente utilizado para el despliegue de
aplicaciones en la nube. Docker Cloud crea una red privada superpuesta que
conecta todos los Contenedores de los nodos contratados por el usuario
otorgándole a cada Contenedor su propia dirección IP. Se dispone de dos
mecanismos para localizar servicios: 1) utilizando el nombre del host y del
servicio (algo similar al DNS) y 2) utilizando Enlaces de Servicio, los que
crean variables de entorno que permiten la comunicación con otros Contenedores
o con servicios externos.
Tanto
Kubernetes como Docker utilizan direcciones IPs (o hostnames) y puertos TCP/UDP
para identificar los servicios. Esto hace más complejo el despliegue y gestión
de aplicaciones, como así también en la protección de las mismas, dado que se
debería controlar el tráfico entre direcciones IP/puertos.
IV. BASES Y FUNDAMENTOS
TECNOLÓGICOS
En
esta sección se presentan aquellos desarrollos, productos y herramientas que se
utilizaron como bases y fundamentos tecnológicos para el diseño de RADAR y para
el desarrollo e implementación de su prototipo.
A. M3-IPC
Uno
de los componentes de un DVS es el Kernel de Virtualización Distribuido (DVK)
el cual se encuentra integrado al kernel de Linux como un módulo. El DVK provee
a los programadores de un avanzado mecanismo de Comunicación entre Procesos
denominado M3-IPC [15] que se instala en todos los nodos del clúster.
M3-IPC
proporciona herramientas para llevar a cabo la comunicación transparente entre
procesos localizados en el mismo o en diferentes nodos. M3-IPC utiliza procesos
Proxies de Comunicaciones para enviar mensajes y datos entre nodos y que pueden
utilizar diferentes protocolos de transporte/red. También dispone de las
características requeridas por un DVS de clase-proveedor tales como, ocultar
las interrupciones de las comunicaciones entre procesos replicados cuando se
producen fallos en los servidores o cuando estos migran a otros nodos del
cluster DVS.
M3-IPC
soporta la replicación de servicios utilizando métodos de replicación
Primary/Backup (P/B) [3] y de Máquina de Estados Replicada (RSM) [6]. En el
primer caso, un proceso llamado Primario es el proceso activo brindando un
servicio, y podría haber varios procesos pasivos o de Backup. Cuando el
Primario falla, uno de los procesos de Backup se transforma en el nuevo
Primario y mantiene activo el servicio. En el segundo caso (RSM), un grupo de
procesos proporciona un servicio a los clientes como si fuese un único
servidor. Todos los procesos están activos, y cuando uno o más de ellos fallan,
los otros procesos continúan brindando el servicio.
M3-IPC
también mantiene la continuidad de las comunicaciones ante la migración de
procesos. Cuando un proceso migra de un nodo a otro, las comunicaciones se
restablecen una vez que el proceso ha migrado o ha regresado a su nodo origen
(migración fallida).
Los
procesos M3-IPC son identificados por medio de un número entero que se denomina
endpoint. Este endpoint no guarda relación alguna con la ubicación de cada
proceso, éste se mantiene aún después de una migración del proceso. Esta
característica se transforma en una importante propiedad que facilita la
programación de aplicaciones, su despliegue y operación.
B. Spread Toolkit
Para
intercambiar información entre los procesos que se ejecutan en los nodos de un clúster
o en la nube se requiere de mecanismos de comunicación con características
tales como confiabilidad, tolerancia a fallos y un alto rendimiento. Existen
varios sistemas y herramientas que ofrecen disponen de estas características
tales como JGroups [16], Appia [17] o Spread Toolkit [7].
Al
desarrollar RADAR se seleccionó Spread Toolkit por haber sido utilizado como
GCS en otros trabajos del grupo de investigación de los autores [8]. Spread
Toolkit es un GCS de código abierto desarrollado en lenguaje C utilizado en
sistemas o aplicaciones distribuidas en donde la confiabilidad, el rendimiento
y la estabilidad de las comunicaciones son características requeridas.
Entre
los servicios básicos que provee Spread Toolkit se encuentra la abstracción de
grupo donde un nombre representa un conjunto de clientes. Dispone de APIs para
la difusión (multicast) de mensajes a un grupo, la notificación de membresías a
un grupo, la entrega confiable de mensajes (aún ante fallos de red o de
miembros del grupo) y la detección de fallos de miembros del grupo o la red.
También soporta varias formas de orden en entrega de los mensajes a los
miembros (FIFO, Causal, Atómico, etc.) convirtiéndola en una herramienta
sumamente versátil para el desarrollo de sistemas distribuidos.
Spread
Toolkit está basado en el modelo de membresía de grupo denominado Extended
Virtual Synchrony (EVS) [18] tolerando fallos de partición de red y su reunión,
fallos de nodos, de procesos y posterior reinicio.
V. DISEÑO E
IMPLEMENTACIÓN DE RADAR
RADAR
es un algoritmo distribuido que detecta cambios en la localización de endpoints
tanto en esquemas de replicación P/B, RSM, como ante la migración de servicios.
Utilizando al GCS, RADAR detecta fallos en los nodos, red y servicios que
componen el sistema distribuido.
Ante
un fallo (fallo de procesos y/o nodos, fallos de partición de red y reunión de
red) o migración, RADAR re-configura el DVS de tal forma que los clientes
mantienen su comunicación con (el ahora) nuevo servidor.
Esto
evita la necesidad de realizar cambios en la configuración de los mismos. El
servidor se identifica sólo con su endpoint para el cual ya se estableció la
nueva ubicación (a través de las APIs del DVK). Debe quedar claro que no se
utiliza un tercer componente como podría ser un Load Balancer o Proxy para
intermediar entre los clientes y los servidores. De esta forma se estaría
incorporando un componente adicional que introduciría un incremento en la
indisponibilidad de la solución, un incremento en la latencia de las comunicaciones,
y una mayor complejidad de gestión del cluster.
Si
el proceso Cliente de un servicio no contara con RADAR para localizar la nueva
ubicación de un servidor, no podría mantener la continuidad en las
comunicaciones con él. El cliente podría quedar a la espera de la respuesta de
un servidor fallido o migrado a otro nodo.
Si
se dispone de RADAR, el seguimiento por cambio de ubicación del servidor es
transparente y automático. El proceso Cliente es capaz de mantener su
comunicación (con un pequeño retardo inicial) dado que es el DVK quien
establece dónde y cómo alcanzar la nueva localización del servidor a partir de
la información suministrada por RADAR. Se puede presentar a RADAR como una
analogía a un protocolo de routeo dinámico de redes IP, pero en este caso el
seguimiento se realiza sobre procesos y nodos.
Funcionamiento de RADAR
RADAR
implementó por cada servicio a monitorear una Máquinas de Estados Finitos
(FSM). La Fig. 2 presenta el diagrama de flujo de la función principal de
RADAR.
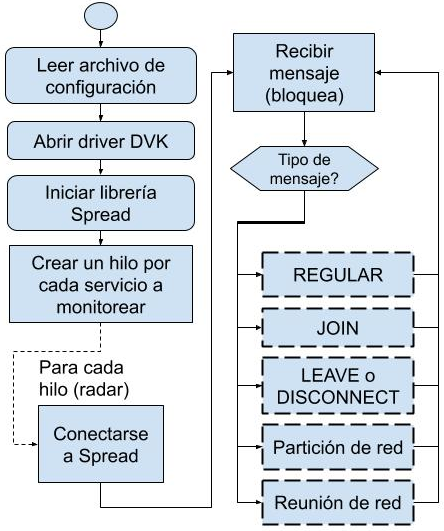
Fig. 2. Función
principal de RADAR.
Los
pasos que se siguen son:
1.Se
lee el archivo de configuración, que recibe como argumento. En éste se
especifican parámetros tales como los endpoints a controlar, los nombres de los
servicios a monitorear con sus identificadores de DC (DCID), etc.
2.Se
inicializan el driver del DVK y las librerías de Spread y del DVS.
3.Se
verifica si cada servicio a monitorear tiene registrado su endpoint en el DVK
local; si no lo está, inicializa las variables, de lo contrario actualiza las mismas
en forma similar a cuando lo hace cuando se ha producido un fallo del servicio.
4.Por
cada servicio a monitorear se crea un hilo (thread) como FSM.
5.Cada
hilo se conecta al grupo Spread del servicio a monitorear e inicia la FSM con
las siguientes operaciones en ciclo:
a) Espera
recibir un mensaje.
b) Verificar
el tipo de mensaje.
c) Según
el tipo de mensaje, ejecutar la función correspondiente, luego volver al punto
a).
Los
mensajes con los que opera RADAR pueden provenir de los siguientes orígenes:
·
De Spread: Cuando se ha producido un
cambio de membresía o de red en el clúster o en los procesos que pertenecen al
grupo. JOIN, indica que un nuevo integrante se ha unido al grupo. LEAVE/DISCONNECT
indican que un miembro del grupo ha finalizado explícita/implícitamente. En
tanto que mensajes de tipo NETWORK indican alguno de los siguientes eventos:
a) Un
nodo ha fallado.
b) Un
nodo se ha desconectado de la red.
c) Se
produjo una partición de red.
d) Se
produjo una re-unión de una red partida.
·
Del Servidor Primario del servicio
monitoreado: Éste informa que él es el Primario y en el nodo donde se localiza.
Si bien el mecanismo RSM no distingue a uno de sus procesos como Primario, a
los efectos de la utilización de RADAR, éste se distingue como aquel servidor que
le informa de cambios.
A
continuación, se detalla el tratamiento que RADAR da a los diferentes tipos de
mensajes.
Tratamiento de Mensajes
1.Mensajes Regulares del Grupo del Servicio
Los
mensajes de tipo Regular son enviados por los miembros del grupo que brinda el
servicio de forma explícita (en general lo hace el Primario). En el desarrollo
de este artículo se contempla que los nodos que brindan el servicio envíen a
RADAR su información local sobre cuáles nodos están sincronizados (es decir, que
pueden asumir la función de activos respecto al servicio). Si bien esta
información no es utilizada por RADAR, podría ser utilizada por otras
herramientas de gestión del DVS.
Para
disponer de información actualizada, cada vez que hay un cambio de configuración
del grupo que conforma el servicio, el servidor Primario envía un mensaje
Regular de tipo MC_RADAR_INFO al grupo (utilizando un servicio de multicast SAFE_MESS
o TOTAL_ORDER del GCS) con el resultado de esos cambios. Si el estado del RADAR
en un nodo es “Sin Primario” o con el “Primario Fallido” o “Desconectado”, se
utiliza la información del mensaje MC_RADAR_INFO para determinar qué acción
realizar. A partir del mensaje recibido se obtiene la información sobre cuáles
nodos están sincronizados y se establece la localización (nodo) del servidor
Primario (Commit) o se vuelve atrás la misma (Rollback). Esta acción dependerá
de si el servicio se ha relocalizado o si el mismo se ha reanudado en el nodo
original tal como estaba antes del evento que originó el mensaje. El
procesamiento de estos mensajes es ilustrado en la Fig. 3.
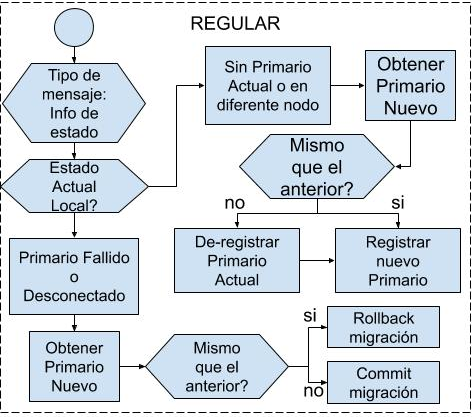
Fig. 3. Tratamiento de mensajes de tipo REGULAR.
2. Mensajes JOIN
La
instancia de RADAR de cada nodo solo actualiza la información del conjunto de
nodos que componen el grupo que brinda el servicio acorde a lo informado por el
GCS en los campos de información del mensaje. Si el emisor que ingresaba al
grupo era un miembro RADAR, se registra también el cambio en un mapa de bits de
miembros RADAR para ese servicio. El procesamiento de estos mensajes es
ilustrado en la Fig. 4.
3. Mensajes LEAVE o DISCONNECT
Si
el mensaje recibido de tipo LEAVE o DISCONNECT es consecuencia de la
finalización de un miembro RADAR, se actualiza la información de nodos y
miembros RADAR (en su mapa de bits) acorde a lo informado por GCS en el
mensaje.
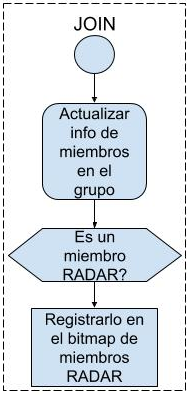
Fig. 4. Tratamiento de mensajes de tipo JOIN.
Si el miembro que finalizó o abandonó el grupo era
el servidor Primario, el miembro RADAR local de cada nodo cambia su estado a NO_PRIMARY_DEAD
y notifica al DVK que el endpoint no
se encuentra disponible. Luego, el DVK de cada nodo detiene todas las
transferencias de datos y mensajes de M3-IPC desde o hacia ese endpoint. En la Fig. 5 se puede observar
el proceso ilustrado.
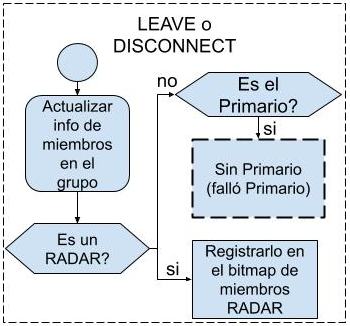
Fig. 5. Tratamiento de mensajes de tipo LEAVE-DISCONNECT.
4.Mensajes NETWORK de partición o de
reunión de la Red
El GCS envía este tipo de mensajes cuando un nodo se
desconecta, o cuando se ha producido una Partición o Reunión de la red del clúster
DVS. Cuando ocurre una partición de red (subconjunto de nodos del estado
anterior), algunos nodos quedan accesibles al miembro RADAR del nodo local y
otros no. El grupo original de nodos se subdivide y cada subgrupo queda sin conexión
con el resto. A este fenómeno se lo conoce como Split-Brain o Cerebro Partido,
ya que no se puede saber el estado real del sistema. Cada partición desconoce
el estado de las otras. Esto lleva al conocido problema CAP (Consistency,
Availability, Partition tolerance)[19] que dice que solo se pueden garantizar
dos de las tres propiedades. Cuando esto sucede se necesita recrear la
información del grupo, y ver cuáles nodos están en la partición del nodo local
donde ejecuta la instancia de RADAR.
Si el nodo Primario original se encuentra en el
mismo grupo que la instancia de RADAR, no se realiza ninguna acción. En cambio,
si el nodo Primario ya no se encuentra disponible se inicia la preparación para
que un nodo Backup pueda continuar el servicio como nuevo Primario. Obviamente,
tal como lo prevé CAP, esto puede traer inconsistencia una vez que se vuelven a
unir las particiones. Mientras tanto, se detienen todas las transferencias de
datos y mensajes M3-IPC con endpoint
del Primario a ser sustituido.
Cuando no se encuentran nodos que dispongan de
procesos de Backup del servicio monitoreado, el sistema pasa al estado
NO_PRIMARY_NET, deteniendo las comunicaciones con el endpoint monitoreado hasta que un nuevo Primario se registre en la
misma partición o se realice una re-unión de la red partida. La Fig. 6 ilustra
el proceso descrito.
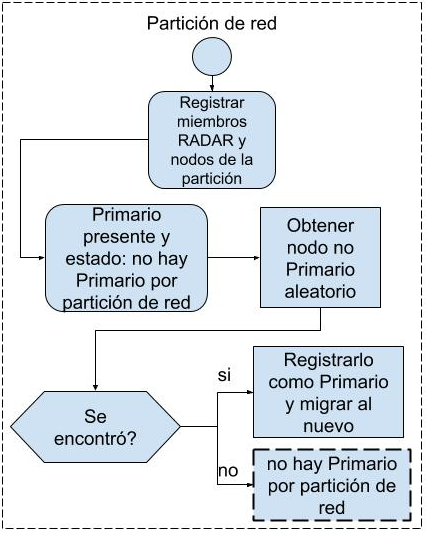
Fig. 6. Tratamiento de mensajes
NETWORK (partición o re-unión de red).
5.Mensajes NETWORK de Fallo de
Desconexión del Servidor Primario
Ante un fallo de desconexión del servidor Primario
se inicia el seguimiento del servicio deteniendo las comunicaciones M3-IPC con
ese endpoint. Luego, se elimina al
Primario de la lista de nodos, se almacena la información del nodo donde se
localizaba el Primario anterior y se establece un estado para RADAR que puede
ser NO_PRIMARY_DEAD (que indican fallo de finalización del servidor Primario),
o NO_PRIMARY_NET (que indica una partición de red que impide alcanzar el nodo
del servidor), dependiendo de la causa de desconexión del servidor Primario.
Ambas circunstancias se encuentran ilustradas en las Fig. 7 y 8 respectivamente.
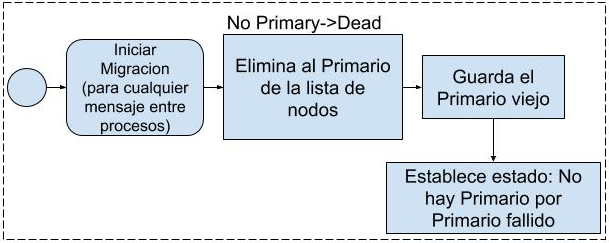
Fig. 7. Tratamiento de mensajes
NETWORK (fallo de desconexión del servidor primario).
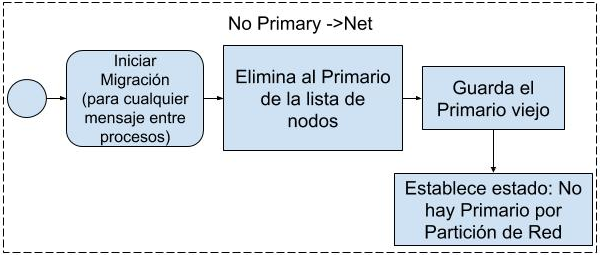
Fig. 8. Tratamiento de mensajes
NETWORK (fallo de desconexión del servidor primario).
Estados de RADAR
De acuerdo a los distintos mensajes recibidos y
situaciones detectadas, RADAR puede estar en los siguientes estados:
· Sin Primario
al Inicio (NO_PRIMARY_BIND): Cuando la
aplicación inicia por primera vez se encuentra en este estado hasta que se
logra registrar el endpoint del
Primario al DVK del nodo local. Si por algún motivo no lo logra (por ejemplo,
el servicio no se está ejecutando), pasa al estado NO_PRIMARY_DEAD.
· Con Primario: Se ha localizado el nodo donde se encuentra
registrado el endpoint del servidor
Primario.
· Sin Primario
por Fallo (NO_PRIMARY_DEAD): Ante un
fallo del proceso servidor Primario, el GCS genera un evento de LEAVE o
DISCONNECT. Se detienen las comunicaciones M3-IPC de los procesos locales con
el endpoint del servidor Primario.
· Sin Primario
por Partición de Red (NO_PRIMARY_NET): Ante una
partición de la red donde el nodo donde ejecuta el servidor Primario no se
encuentre en la partición del nodo de RADAR local, se detienen las
comunicaciones M3-IPC de los procesos locales con el endpoint del servidor
Primario.
Es importante señalar que, si bien en el esquema de
replicación RSM no existe el concepto de servidor Primario, para el proceso
Cliente su servidor “Primario” será aquel que tiene asignado para realizar sus
peticiones.
En la Fig. 9 puede observarse un diagrama de estado
para RADAR.
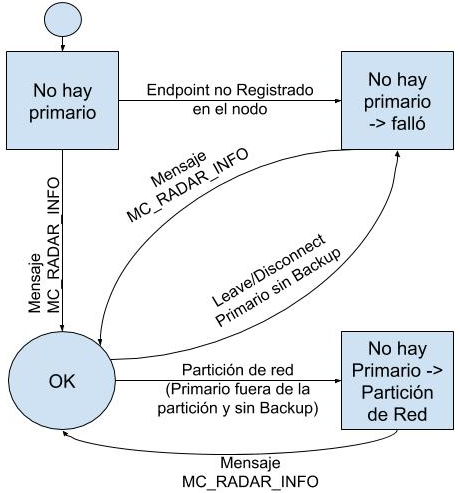
Fig. 9. Estados posibles de RADAR.
VI. EVALUACIÓN
En esta sección se analizan los resultados obtenidos
al utilizar el algoritmo RADAR para el seguimiento de servicios replicados. Se
describe la batería de pruebas realizadas sobre el mismo y el escenario
utilizado. Se analizan, también, los resultados en cada una de ellas y si se
cumplen los objetivos deseados.
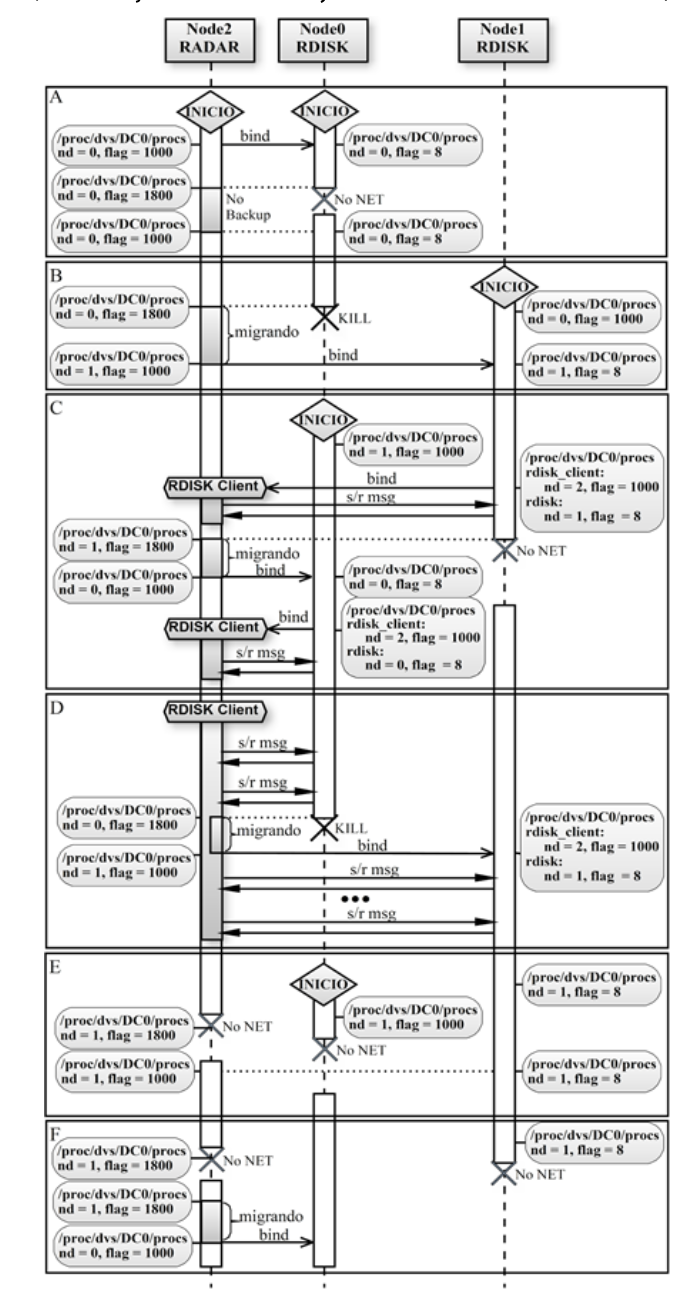
A. Escenarios de Pruebas
La batería de pruebas a las que se sometió el
algoritmo RADAR fue diseñada para simular diferentes fallos de entorno reales
(Fig. 10). Para realizarlas se utilizó un como banco de pruebas un entorno
virtualizado.
Se crearon Máquinas Virtuales (VMs) conectadas entre
sí mediante una red virtual que simulaban un clúster DVS.
La virtualización se realizó utilizando VMware
Workstation y se configuró un clúster de 3 nodos: Node0, Node1 y Node2.
El proceso a monitorizar fue un servidor de
almacenamiento (disco remoto) denominado RDISK. Cliente y Servidor se
ejecutaron en el entorno de un Contenedor Distribuido (DC0).
En los nodos Node0 y Node1 se
ejecutaron instancias de RDISK que serían Primario/Backup, en tanto en Node2
se ejecutó el proceso Cliente de RDISK el cual requería el seguimiento del
servicio, por lo que se ejecutó una instancia local de RADAR en Node2.
La ejecución de las distintas pruebas y sus
resultados se pueden observar en la Fig. 10. En ella se muestra el estado de
los procesos registrados en el DVK de cada nodo según el contenido (dinámico)
del archivo /proc/dvs/DC0/procs en
los momentos de importancia en cada prueba. Este archivo contiene la lista de
procesos en ejecución en el DC0 y los estados de los mismos. Se puede
observar, entre otras cosas el número de nodo donde se encuentra ejecutando un
proceso determinado (columna nd) y un
código (columna flag) que indica su
estado. Los estados que se identifican en estas pruebas son: 8 (proceso Local),
1000 (proceso Remoto alcanzable) y 1800 (proceso Remoto no alcanzable).
A continuación, se detallan las pruebas realizadas.
1.Fallo y restitución de la conexión
del servidor Primario sin Backup
En esta prueba (Fig. 10-A) solo se ejecutó una
instancia de RDISK en Node0, de manera que solo existe un servidor Primario y
no se dispone de servidores de Backup.
Inicialmente, RADAR asoció el proceso RDISK al
Node0, estableciendo en consecuencia a nd=0 y flag=1000 en Node2.
Cuando se provocó un fallo de red en Node0, el
estado del proceso RDISK en Node2 cambio al valor flag=1800 para indicar que el
proceso no estaba activo o no era alcanzable.
Una vez que se restableció la conexión de red en
Node0, se volvió a detectar la disponibilidad del proceso RDISK y su estado
cambió a flag=1000, sin modificarse el valor de nd.
2.Fallo de la conexión del servidor
Primario con Backup
Para esta prueba (Fig. 10-B) se incorporó un
servidor de RDISK de Backup (Node1) del Primario (Node0). Se puede observar que
en el archivo del directorio /procs del servidor Backup, el proceso RDISK posee
un estado flag=1000 con nd=0 indicando que el endpoint es Remoto localizado en
Node0.
Cuando se finaliza abruptamente el proceso de RDISK
en Node0 (mediante un comando kill), el GCS detecta el cambio e informa a RADAR
que comienza la secuencia de seguimiento para asociar RDISK a otro nodo. La
instancia de RDISK del Node1, también detecta el fallo del Primario, ejecuta un
algoritmo de elección y como único miembro sincronizado del grupo se proclama
como nuevo Primario. Es entonces cuando realiza un multicast de un mensaje de
tipo MC_RADAR_INFO. Todas las instancias de RADAR de los diferentes nodos
actualizan la información del nodo donde se está ejecutando el nuevo Primario,
en este caso Node1.
Como resultado se puede observar que RDISK en el
archivo del directorio /procs de Node2 posee un estado de flag=1000 (Remoto
activo/alcanzable) y ubicado en Node1 (nd=1). Además, se observa que en el
archivo del directorio /procs de Node1 ha cambiado e indica que RDISK es un
proceso local (flag=8). Esto siempre es así con el proceso RDISK en el nodo que
ejecuta como servidor Primario.
3.Fallo de la conexión del nuevo
servidor Primario y vuelta al servidor Primario Anterior
A partir del estado alcanzado en la prueba anterior,
se reinició la instancia de RDISK del Node0, para disponer así de un servidor
que realice la función de Backup.
Luego, se inicia en Node2 un Cliente de RDISK, que
enviará y recibirá mensajes a/desde el servidor RDISK (Fig. 10-C).
Una vez ejecutado el Cliente, los mensajes fueron
enviados y recibidos a/desde el servidor RDISK (Node1). A continuación, se
causó un fallo de red de Node1, que fue detectado por el GCS y reportado tanto
a los miembros RADAR como RDISK.
La instancia de RDISK del Node0 se proclama nuevo
Primario, y el miembro RADAR de Node2 modifica la configuración, primero para
indicar que el proceso no es más alcanzable en Node1 (flag=1800) y luego para
que el endpoint del servicio indique a nd=0, como alcanzable (flag=1000).
El Cliente de RDISK funcionó sin presentar
inconvenientes nuevamente, pero ahora enviando los mensajes y recibiendo
a/desde Node0.
Se puede observar que antes y después del fallo,
quien realiza las tareas de servidor Primario de RDISK asoció el cliente de
RDISK en su lista de procesos del DC0. Este Cliente tiene valores de nd=2 y
flag=1000 porque el proceso es Remoto y se ubica en Node2.
4.
Fallo del proceso del servidor Primario con Backup
En esta prueba (Fig. 10-D), se utiliza a Node0
como servidor Primario y a Node1 como Backup. También se inicia el
cliente de RDISK en Node2. Sin embargo, ahora se provoca la interrupción
de servicio del Primario durante el envío de varios mensajes sucesivos (en
lugar de un fallo de red), deteniendo al proceso RDISK en Node0 en forma
abrupta mediante el comando kill.
Cuando RADAR recibe un mensaje del GCS que da cuenta
de una falla del servidor Primario, este comienza el proceso de relocalización
para asociar el endpoint de RDISK a
otro nodo. En este proceso, los valores nd
y flags en el archivo del directorio /procs pasan de valer 0→1 y 1800→1000
respectivamente.
A pesar de que el fallo se produce durante el envío
de mensajes, el cliente no percibe ningún problema al enviar/recibir mensajes M3-IPC
y no requiere de ningún cambio de configuración, demostrando transparencia
total al fallo.
De manera similar, se realizó una prueba con un
escenario donde se finaliza abruptamente la VM (tal como un apagado o fallo
eléctrico en un computador) en la que ejecuta el servidor Primario y los
resultados fueron los mismos. Este escenario no se describe por ser
prácticamente idéntico.
5.
Fallo de conexión del nodo del servidor Backup y del nodo del Cliente.
A partir del estado alcanzado en la prueba anterior,
se reinició la instancia de RDISK del Node0, para disponer así de un
servidor que realice la función de Backup. A continuación, se provocaron
(artificialmente) fallas sobre el nodo donde se ejecutaba RADAR (Node2)
y sobre el servidor de Backup (Fig. 10-E).
El resultado es que RADAR detecta la pérdida de
conexión o de disponibilidad del servidor Primario, pero al no poder alcanzar
al servidor Backup, la asociación del proceso de RDISK permanece en Node1,
solo que su estado pasa a ser no alcanzable (flag=1800). Permaneció en ese estado hasta que se restableció la
conexión del Node2 al grupo, momento en el cual el estado del endpoint RDISK volvió a ser flag=1000.
6.
Fallo de conexión del nodo Cliente
En esta prueba (Fig. 10-F), luego de ser
reestablecida la conexión del Node0 (que es ahora servidor Backup), se
provocó un corte de conexión en Node2 y poco después en Node1. En
un primer momento, el estado del proceso RDISK paso a ser flag=1800 porque ya no era alcanzable. Luego, cuando se restableció
la conexión de Node2, RADAR cambio la asociación del proceso RDISK al Node0
(nd=0), donde se ejecuta el nuevo
servidor Primario (antes Backup).
El conjunto de pruebas realizadas contempló
situaciones representativas de las funciones especificadas como requerimientos
de diseño de RADAR. En ellas se consideraron tanto fallos de procesos
servidores Primarios, servidores Backups y clientes, como así también la
detención explícita o abrupta de nodos, y las interrupciones o particiones de
la red del clúster. Todas las pruebas arrojaron los resultados esperados y demostraron
la principal característica de RADAR de permitir que los clientes de un
servicio operen sin interrupciones y con total transparencia ante fallos de
servidores replicados en un clúster DVS.
VII. CONCLUSIONES Y TRABAJOS FUTUROS
Existen diversas soluciones para resolver el
problema de la localización y seguimiento de servicios ante fallos. Estas
presentan características deseadas en cuanto a escalabilidad y disponibilidad
se refiere, pero carecen de sencillez en la implementación y gestión de los
mecanismos a los que recurre para lograrlo. Es necesario tratar con varias
configuraciones y esto debe tenerse en cuenta al desarrollar aplicaciones
distribuidas.
RADAR, además de brindar escalabilidad,
confiabilidad y disponibilidad, es sencillo de implementar y configurar; y
ligero en términos de requerimientos lo que facilita su despliegue,
mantenimiento y operación reduciendo sus costos asociados. Todo esto se logra
utilizando la infraestructura provista por el DVS y al GCS como parte de esa infraestructura.
RADAR permite que los clientes continúen operando
normalmente, brindando transparencia total ante fallos de los procesos servidores
replicados que monitorea.
Como trabajo a futuro se plantea permitir el
funcionamiento de RADAR con configuraciones dinámicas utilizando servidores de
tipo Clave-Valor, ya que en este prototipo se utilizaron archivos de
configuración.
Finalmente, como el prototipo de RADAR se desarrolló
con soporte para esquemas de replicación P/B y RSM, se planean realizar las
modificaciones necesarias para utilizar el esquema Chain Replication [20].
VIII. REFERENCIAS Y BIBLIOGRAFÍA
[1]
P. Pessolani, T. Cortes, F. Tinetti, S.
Gonnet, “An Architecture Model for a Distributed Virtualization System”, The
Ninth International Conference on Cloud Computing, GRIDs, and Virtualization,
Barcelona, España, February 2018.
[2]
R. Nikolaev, G. Back, "VirtuOS: An operating system with kernel
virtualization", Proceedings of the Twenty-Fourth ACM Symposium on
Operating Systems Principles, Farmington, PA, USA, November 2013.
[3]
N. Budhiraja, K. Marzullo, F. B. Schneider, S.Toueg, “The primary-backup
approach”, in Distributed systems (2nd Ed.), Sape Mullender, pp. 199-216, New
York, NY, USA, ACM Press/Addison-Wesley Publishing Co, 1993.
[4]
T. Li, B. Cole, P. Morton, D. Li, "RFC 2281 - Cisco Hot Standby Router
Protocol (HSRP)”, Network Working Group IETF, March 1998.
[5]
S. Nadas, E. Ericsson, "RFC 5798 - Virtual Router Redundancy Protocol
(VRRP) Version 3 for IPv4 and IPv6", Network Working Group IETF, March
2010.
[6]
F. B. Schneider, "Implementing Fault-Tolerant Services Using the State
Machine Approach: A Tutorial", ACM Computing Surveys. vol. 22, no. 4, pp.
299–319, December 1990.
[7]
The Spread Toolkit. [En línea]. Accedido Mayo 2019. http://www.spread.org
[8]
M. Alemandi, O. Jara, “Un driver de disco tolerante a fallos”, Jornada de
Jóvenes Investigadores Tecnológicos (JIT 2015), Rosario, Santa Fe, Argentina, November
2015.
[9]
“Apache ZooKeeper”. [En línea]. Accedido Julio 2019. https://zookeeper.apache.org/.
[10]
“Etcd”. Accedido Julio 2019. [En línea].
Disponible en: https://github.com/etcd-io/etcd.
[11]
“Consul”. [En línea]. Accedido Julio 2019. Disponible en: https://www.consul.io/.
[12]
D. Ongaro, J. Ousterhout, “In search of
an understandable consensus algorithm”. 2014 USENIX Annual Technical
Conference, Philadelphia, PA, USA, 2014.
[13]
“Kubernetes”. [En línea]. Accedido Julio 2019. Disponible en: https://kubernetes.io/es/.
[14]
“Docker”. [En línea]. Accedido Julio 2019. Disponible en: https://www.docker.com/.
[15]
P. Pessolani, T. Cortes, F. G. Tinetti, S. Gonnet, “An IPC Software Layer for
Building a Distributed Virtualization System”, Congreso Argentino de Ciencias
de la Computación (CACIC 2017), La Plata, Buenos Aires, Argentina, October
9-13, 2017.
[16]
“JGroups”. [En línea]. Accedido Julio 2019. Disponible en: http://www.jgroups.org/.
[17]
H. Miranda, A. Pinto, L. Rodrigues, “Appia, a Flexible Protocol Kernel
Supporting Multiple Coordinated Channels”, Proceedings of the The 21st
International Conference on Distributed Computing Systems, Mesa, AZ, USA, April
2001.
[18]
L. E.Moser , Y. Amir, P. M. Melliar-Smith, D. A. Agarwal, "Extended
Virtual Synchrony", in Proceedings of the IEEE 14th International
Conference on Distributed Computing Systems, Poznan, Poland, June 1994.
[19]
Seth Gilbert and Nancy Lynch, "Brewer's conjecture and the feasibility of
consistent, available, partition-tolerant web services", ACM SIGACT News,
Volume 33 Issue 2 (2002), pg. 51–59. doi:10.1145/564585.564601.
[20] R.Van Renesse,
F. B. Schneider, “Chain Replication for Supporting High Throughput and
Availability”, 6th OSDI 2004, San Francisco, CA, USA, December 2004.